Computational Design Synthesis of Soft Robots
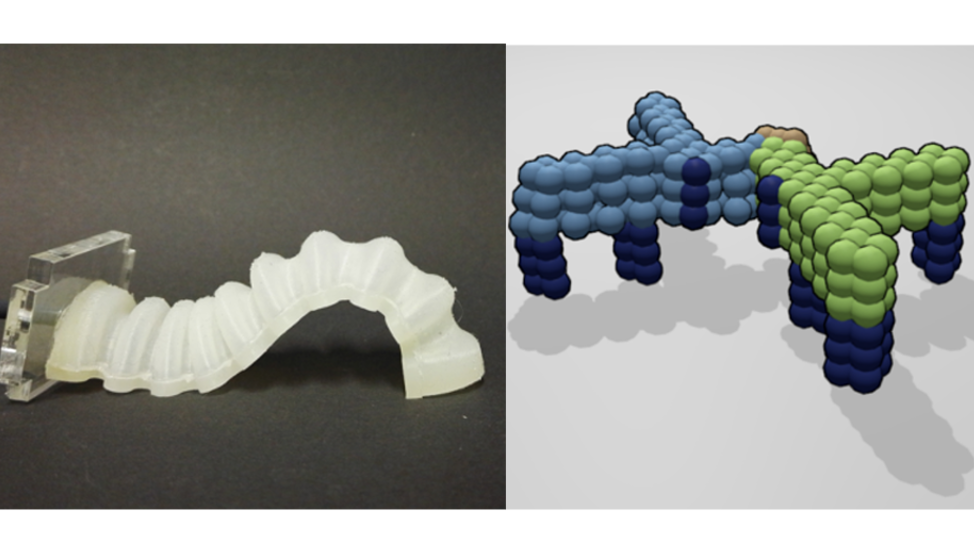
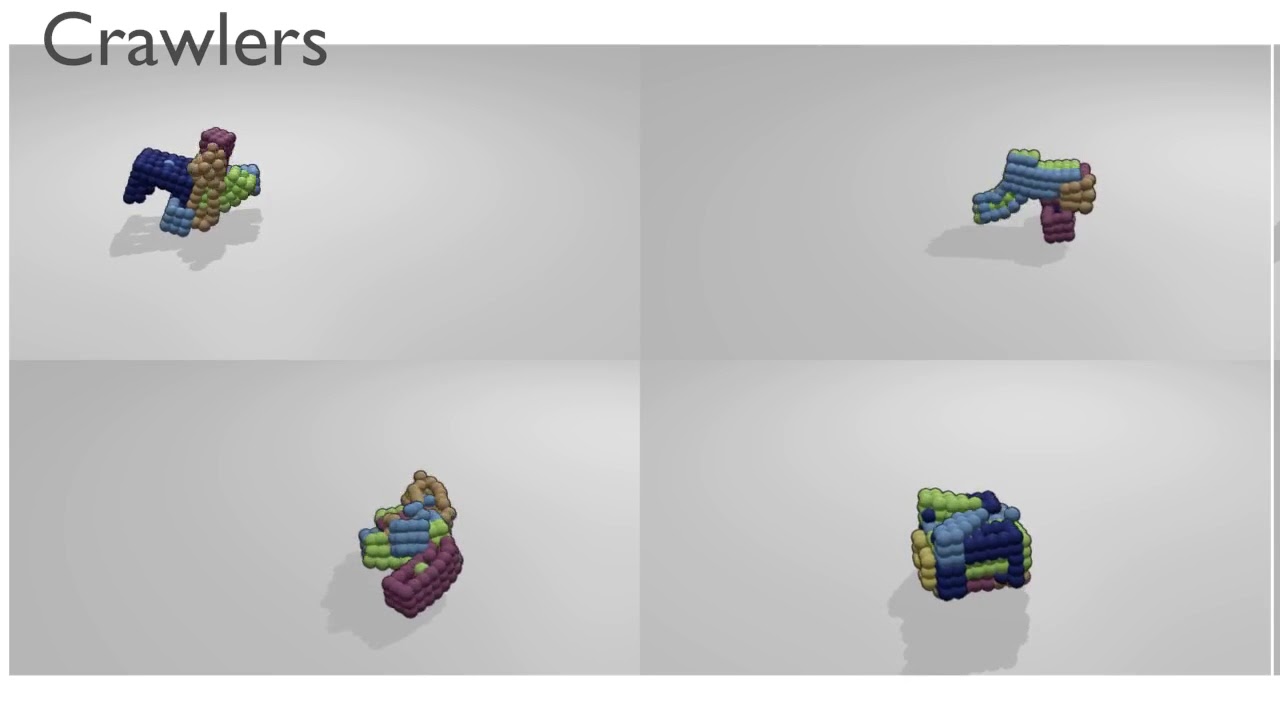
Soft robots have the advantage over conventional robots in that they are intrinsically compliant and have a large number of degrees of freedom. The vast design space and the complex dynamic interaction between activation and the elastic body of the robot make designing them by hand challenging, often requiring a large number of iterations. It is thus advantageous to design soft robots using a computational design approach that integrates simulation feedback. The high number of designs evaluated in a Computation Design Synthesis (CDS), imposes constraints both on the stability and execution time of the simulation method, as well as on the methods for representation and generation of the soft robot morphologies. To respond to that challenge, the use of a method from the computer graphics field for the simulation of designs is investigated. Designs are generated using a shape grammar that captures existing design knowledge in the grammar rules to generate both known and novel designs as well as exclude infeasible designs. The design optimization is realized using simulated annealing. These methods are shown to generate a variety of conceptual designs for a soft locomotion robot.
